Markov 决策过程
This page is not available in English yet. (つд⊂)
Markov 决策过程中文译为马尔可夫决策过程。英文全称为 Markov Decison Processes,简称 MDP.
为了便于描述,首先定义一个“世界”,如下:
从起点开始,每次选择往四个方向走一格子。目标是到达绿色格子,游戏结束,碰到红色则失败,游戏结束。 黑色格子为障碍物,碰到障碍物或撞到墙壁则原地不动。 但是每次移动准确率只有80%,另外有20%的概率向与目标方向垂直的方向移动,这两个垂直的方向概率各是10%.
名词定义
- **STATES(状态):**顾名思义,就是智能体当前的状态。在这个世界中,表现为「坐标」。则开始状态就是(1,1),目标状态是(4,3).
- **ACTIONS(动作):**即在一个特定的STATE中所做的事。在这个世界中表现为四向移动。
- **MODEL(转换模型):**模型描述了整个游戏规则。可以抽象为有三个参数的函数:
T(s,a,s'),他生成的其实是一个概率:P(s'|s,a),即:从状态s,采取动作a,转换到状态s’的概率。 - **REWARD(奖励):**即到达一个状态得到的反馈。例如到达绿色格子可以获得正数奖励。所以可以表述为与状态有关的函数:
R(s),也可以变形为R(s,a)或R(s,a,s'). - **POLICY(策略):**上面三个定义组成了一个「问题」,则策略就是一个解决方案。它根据所处的状态,返回一个动作。可以表述为函数:
π(s) → a. 而 则表示最优策略,它最大化长期期望奖励。
从MODEL定义,可以得出 Markov 特性,即:下一个状态的产生只和当前状态有关。
不同奖励下的策略
无穷时域是前提假设,即:只要不进入红绿格子,游戏可以一直进行下去。
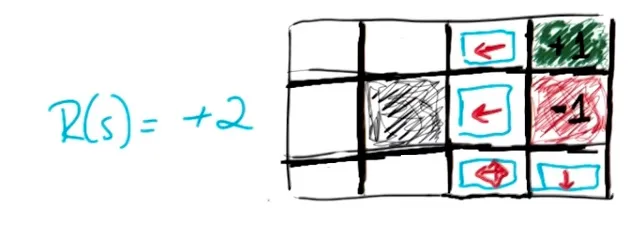
当空白格子奖励为+2,甚至大于目标格子的奖励。那么智能体就会尽可能地留着游戏中不出局。基于此,可得上图策略。 需要注意,第(3,3)格子不可以向下。若向下,则有10%概率结束游戏,若向左则不可能结束游戏。

当空白格子奖励为-2,为了最大化长期期望奖励,智能体应该尽快结束游戏。基于此可得上图策略。 需要注意,第(3,1)格不可以向上。若向上则有10%概率向左,距离结束位置更远。
偏向稳定性
有一个关于状态序列的价值函数 V: 有这样一个事实:
若 则有
同时,价值说明了延迟奖励的意义所在。即采取某一动作当时不会获得高额奖励甚至是负数奖励,但未来可以收获较多奖励。
折扣期望
引例
假设有下面两种奖励序列:
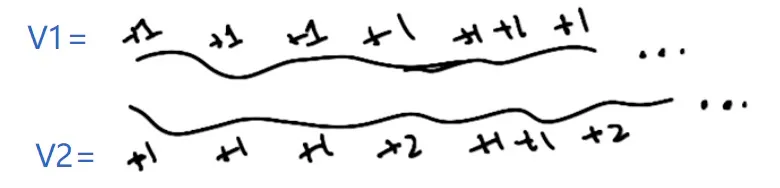
直观上可能会认为 V2 > V1,但是实际上 V2 = V1 = ∞. 实际与直观并不相符。即使这样,我们也可能更偏爱V2. 造成这种现象的直接原因就是时域是无穷的,进而导致奖励不断累积,长期期望奖励趋向于无穷大。
折扣
为了解决上述问题,可以改变一下函数 V. 如此一来,随着时间推移,每一步获得的奖励会越来越小。不难看出这是一个等比数列求和: 这就是折扣期望,也叫折扣数列或折扣总和。他实现了无穷到有穷的转变。即:可以一直走下去,但最终获得的总奖励是有限的。
最优策略
推导
根据定义,最优策略应该最大化长期期望奖励,即:
那么在遵循π策略时的价值就应该是:
需要注意,. 价值是一个长期的反馈,而奖励是进入某一状态的立即反馈。
在有了价值之后,可以优化一下最优策略的表达式:
即:最大化 加总 进入状态s’的概率与它价值的积。 另外,如果遵循最优策略,那么这个价值就是最优策略价值。即 ,称之为
状态的真实价值。 所谓最优策略就是:对于每一个状态,返回的动作能够最大化期望价值。
展开价值方程可得 Bellman 方程(贝尔曼方程):
即:某个状态的真实价值 = 进入此状态得到的奖励 + 所有从此状态开始获得的奖励的折扣。
求解 Bellman 方程
由于实际上有n个状态,所以实际上这是一个n元方程组,包含n个方程。(R/T已知,V未知)
值迭代
思路:
- 从任意价值开始。
- 基于他们临近的状态更新这个价值。
- 重复第二步。
假设每次更新时间为t,则第二步方程可表述为:
此算法叫做值迭代。
实例:
对于状态x,求两次迭代后的价值值
第一次迭代: 初始价值都是0,对于状态x显然往右走期望最大。因此: 同理,对于状态(3,2),显然向左走期望最大,为0. 其他方向均小于0. 因此:
第二次迭代: 对于状态x,依然是向右期望最大。因此:
策略迭代
思路:
- 从任意的一个 开始。
- 对于给定的 ,令 .
- 更新 .